Поляра скоростей
Поляра скоростей системы пилот-параплан представляет
собой зависимость вертикальной составляющей истинной воздушной скорости от
горизонтальной: , рис.1. , рис.1.
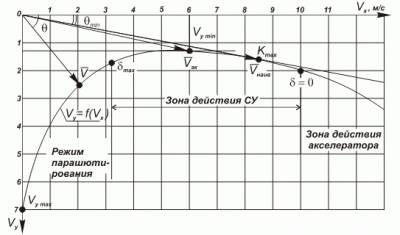
Рис.1 Поляра скоростей параплана
Для удобства анализа ось направлена вниз, а ось направлена вниз, а ось – вправо. – вправо.
В таком представлении поляры радиус-вектор,
соединяющий начало координат с любой точкой поляры
скоростей, представляет собой вектор истинной воздушной скорости системы
пилот-параплан с любой точкой поляры
скоростей, представляет собой вектор истинной воздушной скорости системы
пилот-параплан . Причем модуль вектора истинной воздушной скорости равен: . Причем модуль вектора истинной воздушной скорости равен: . .
Угол  между осью и вектором скорости
системы пилот-параплан на поляре скоростей
является углом наклона траектории (углом планирования системы). между осью и вектором скорости
системы пилот-параплан на поляре скоростей
является углом наклона траектории (углом планирования системы).
Параметром, соответствующим каждой точке поляры и
осуществляющим разметку поляры, является величина симметричного хода строп
управления (СУ) – . Таким образом, радиус-вектор, соединяющий начало координат
с любой точкой поляры скоростей,
представляет собой вектор истинной воздушной скорости системы пилот-параплан, соответствующий данному, конкретному отклонению строп управления, в частности, и когда СУ полностью отпущены:=0. Величина хода СУ, при их постепенном отклонении,
перемещает конец вектора скорости вдоль полярной кривой от=0 до = . Таким образом, радиус-вектор, соединяющий начало координат
с любой точкой поляры скоростей,
представляет собой вектор истинной воздушной скорости системы пилот-параплан, соответствующий данному, конкретному отклонению строп управления, в частности, и когда СУ полностью отпущены:=0. Величина хода СУ, при их постепенном отклонении,
перемещает конец вектора скорости вдоль полярной кривой от=0 до =  . .
В такой «перевернутой» системе координат поляра
скоростей представляет собой выпуклую кривую (или вогнутую, если систему
координат и поляру отразить симметрично относительно оси ). Далее все рассуждения проводятся для «перевернутой»
системы координат.
На поляре скоростей существует ряд замечательных и
характерных точек.
1. Точка максимального аэродинамического качества . .
Если из начала координат провести касательную к
поляре, то точка касания и определит режим отклонения СУ , соответствующий минимальному углу наклона траектории
(планирования системы) , что будет соответствовать максимальной величине
аэродинамического качества системы. Скорость , что будет соответствовать максимальной величине
аэродинамического качества системы. Скорость , соответствующая максимальному
аэродинамическому качеству, называется наивыгоднейшей. , соответствующая максимальному
аэродинамическому качеству, называется наивыгоднейшей.
2. Точка минимальной вертикальной составляющей
скорости . .
Если к поляре провести касательную параллельно оси, то точка касания определит режим отклонения СУ , соответствующий минимальной вертикальной составляющей
скорости. Радиус-вектор истинной воздушной скорости, соответствующий
точке на поляре скоростей,
называется экономической (экономичной) скоростью планирования . .
3. Точка, соответствующая режиму полета при
полностью отпущенных СУ:=0. В большинстве случаев находится правее точки,
соответствующей точке максимального аэродинамического качества.
4. Точка входа в режим парашютирования.
Режим парашютирования реализуется при предельно
допустимых, сильно затянутых СУ:=. В этом режиме горизонтальная составляющая скорости падает
практически до нуля, а вертикальная возрастает до своего максимального
значения при условии, что
геометрия крыла сохраняется полностью наполненной и крыло остается над головой
пилота. при условии, что
геометрия крыла сохраняется полностью наполненной и крыло остается над головой
пилота.
Акселератор как бы достраивает (удлиняет) поляру
вниз – вправо, в сторону увеличения результирующей скорости системы
пилот-параплан, рис.1.
Триммер несколько смещает поляру вверх, относительно
ее базового установочного значения (при полностью отпущенном триммере),
минимизируя величину вертикальной составляющей скорости , [1]. , [1].
Вопрос. Может ли достигаться величина при выжатом
акселераторе?
Рассмотрим поляру скоростей системы пилот-параплан.
Предположим априори, что на выжатом акселераторе
может достигаться максимальное аэродинамическое качество. А это означает, что
на поляре скоростей , для того, чтобы касательная к поляре, проведенная из начала
координат и определяющая положение точки существовала в зоне действия акселератора, должно выполняться
условие: . Т.е. кривая должна быть либо
выпуклой вниз . Т.е. кривая должна быть либо
выпуклой вниз  , либо не иметь кривизны , либо не иметь кривизны  , т.е., быть отрезком прямой. Но при выжатом акселераторе не может выполняться
условие , так как тогда горизонтальная составляющая воздушной
скорости должна возрастать при одновременном уменьшении вертикальной
составляющей, что противоречит физике реального процесса. Тогда остается случай:, т.е. поляра в зоне действия акселератора должна быть
отрезком прямой , т.е., быть отрезком прямой. Но при выжатом акселераторе не может выполняться
условие , так как тогда горизонтальная составляющая воздушной
скорости должна возрастать при одновременном уменьшении вертикальной
составляющей, что противоречит физике реального процесса. Тогда остается случай:, т.е. поляра в зоне действия акселератора должна быть
отрезком прямой  , с которой совпадает касательная, проведенная из начала
координат, и на которой продолжает оставаться максимальным аэродинамическое
качество системы, рис.1. , с которой совпадает касательная, проведенная из начала
координат, и на которой продолжает оставаться максимальным аэродинамическое
качество системы, рис.1.
Вывод.
Теоретически возможно, что, в крайнем случае, при выжатом акселераторе,
величина не достигается, а
может лишь оставаться равной уже ранее достигнутой на поляре (на некотором ее
отрезке, достроенном самим акселератором).
Если же на всей поляре, с учетом выжатого
акселератора, выполняется условие , то на участке, достроенном акселератором, уже не может быть
реализовано аэродинамическое качество, равное величине. , то на участке, достроенном акселератором, уже не может быть
реализовано аэродинамическое качество, равное величине.
Литература
1. Иванов П.И. Проектирование, изготовление и
испытания парапланов (монография, ISBN 966-95903-0-2),- вып.4,
Феодосия, 2007.– 280 с.
|  парашюты и парапланы
парашюты и парапланы